
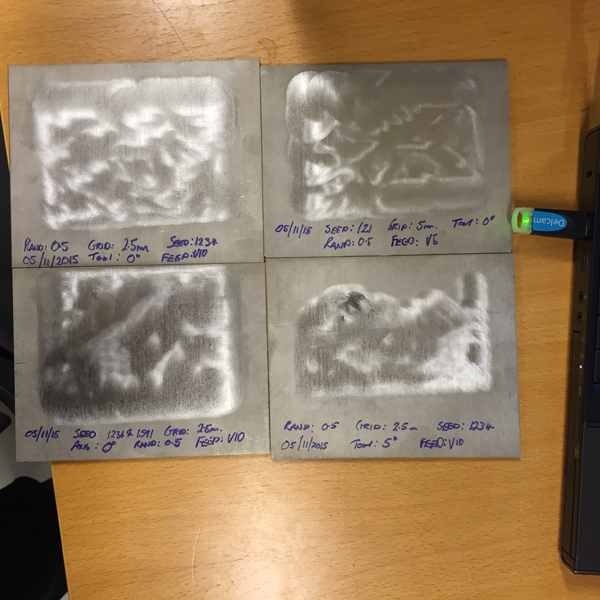

On the last day of the meeting in Sweden, the consortium partners visited Halmstad University. After a University tour, the partners moved to the laboratory. Since the robot cell was not yet implemented in Delcam PowerMILL Robot this was the first step that had to be done. After implementing the cell and driving some test tool paths the grinding tests started. A specially developed grinding head was mounted to the ABB industrial robot to run the tests. The tool paths were generated immediately before running those with the robot setup. The following pictures show the robot cell with the grinding head and some results of random tool path tests on hardened steel samples.
![]()
Symbiotic Human-Robot Solutions for Complex Surface Finishing Operations